
Der Verkehr der Zukunft wird maßgeblich von autonomen Fahrzeugen geprägt – ob Deutschland hier mit der Entwicklung auch im globalen Vergleich Schritt hält, entscheidet sich in den kommenden Jahren. Die Deutsche Forschungsgemeinschaft hat daher ein breit angelegtes Schwerpunktprogramm aufgelegt, an dem die Universität Kassel sich gleich mit zwei Forschungsgruppen beteiligt.
Autonom fahrende Fahrzeuge sind in einigen Jahren keine Vision mehr. Schon heute ist das Fahren hochgradig automatisiert, wie Assistenzsysteme für die Autobahn oder automatische Einparksysteme zeigen. Klassische Automobilhersteller und auch neue Unternehmen wie beispielsweise Google arbeiten intensiv am Thema „Autonomes Fahren“. Wichtig wird dafür die Zusammenarbeit der (teil-)autonomen Fahrzeuge untereinander sowie mit der Verkehrsinfrastruktur wie etwa Ampelsystemen oder anderen Verkehrsteilnehmern, etwa Fußgängern.
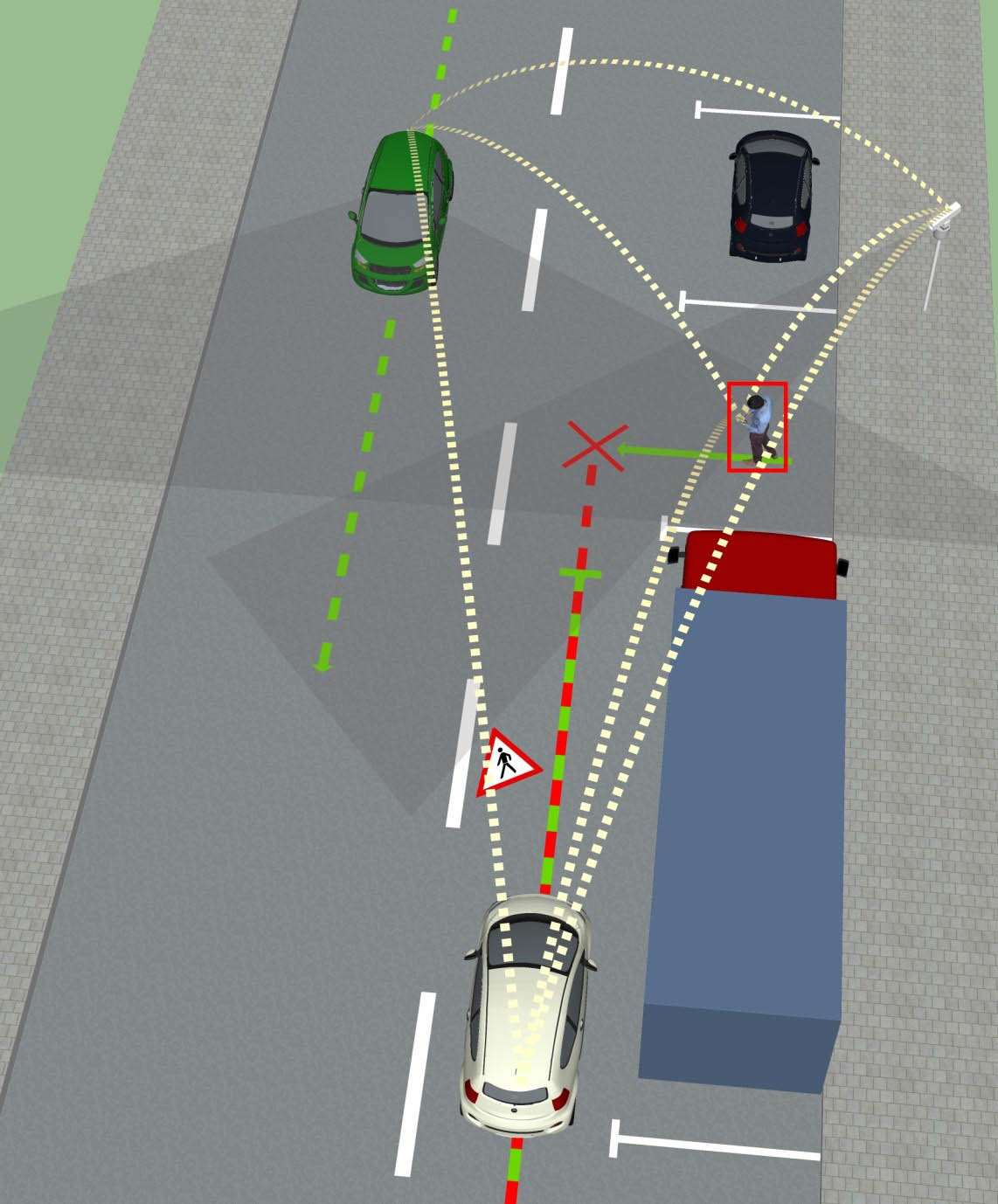
Szenarien wie diese könnten künftig durch die Kommunikation der Fahrzeuge untereinander gelöst werden. Im abgebildeten Fall verständigen sie sich darauf, dass sie zunächst den Fußgänger die Straße überqueren lassen, dass dann das weiße Fahrzeug seine Fahrt fortsetzt, und schließlich das grüne Fahrzeug vor dem LKW einparkt. Bild-Credits: truck: copyright resources.blogscopia (licensed under creative commons 2.5 CC BY 2.5); small concept car: copyright doschdesign (licensed under creative commons 2.5 generic CC BY 2.5) (Click image to enlarge)
Die Deutsche Forschungsgemeinschaft (DFG) hat ein Schwerpunktprogramm zur Grundlagenforschung zum Thema „Kooperativ Interagierende Automobile“ ins Leben gerufen. Im Rahmen dieses Schwerpunktprogramms werden bundesweit 14 Projekte an Hochschulen gefördert. Die Universität Kassel war mit dem Institut ISAC (Institute for System Analytics and Control) bei der Antragstellung besonders erfolgreich. In den nächsten Jahren werden an zwei Fachgebieten, die zum ISAC gehören, Projekte durchgeführt und insgesamt mit etwa 490.000 Euro von der DFG gefördert. Beide Projekte beschäftigen sich mit der Frage, wie Fahrzeuge effektiv untereinander und mit anderen Verkehrsteilnehmern kooperieren können.
Das Fachgebiet Intelligente Eingebettete Systeme unter Leitung von Prof. Dr. Bernhard Sick beschäftigt sich im Rahmen des Projekts „Detecting Intentions of Vulnerable Road Users Based on Collective Intelligence as Basis for Automated Driving“ (DeCoInt2) mit dem Schutz von verletzlichen Verkehrsteilnehmern, insbesondere Radfahrern und Fußgängern. Ein Beispiel verdeutlicht, wie eine Kooperation verschiedener Verkehrsteilnehmer dabei helfen kann: Ein Auto fährt im Stadtverkehr an einem Lkw vorbei (siehe Bild unter Download-Link, weißes Fahrzeug). Obwohl es mit Sensorik wie etwa Kameras ausgestattet ist, „sieht“ es nicht, dass hinter dem Lkw gerade ein Fußgänger auf die Straße läuft. Ein in die Gegenrichtung fahrendes zweites Fahrzeug (grün) erkennt diesen Fußgänger, ist in der Lage die Gefahrensituation vorherzusagen, und übermittelt eine entsprechende Warnung an das erste Fahrzeug. Dieses Fahrzeug könnte dann entweder den Fahrer rechtzeitig warnen oder, im Fall des autonomen Fahrens, bremsen oder eine Ausweichbewegung durchführen. Die Erkennung der Absichten ungeschützter Verkehrsteilnehmer und damit deren Sicherheit kann verbessert werden, wenn sich weitere Fahrzeuge, die Verkehrsinfrastruktur (z. B. an gefährlichen Kreuzungen montierte „intelligente“ Kameras) oder die Fußgänger selbst an der Erkennung beteiligen (etwa durch Signale, die Smartphones bei entsprechenden Bewegungen geben). Das Projekt wird gemeinsam mit der Hochschule Aschaffenburg und der Universität Passau bearbeitet.
Das Fachgebiet Regelungs- und Systemtheorie (Leitung Prof. Dr. Olaf Stursberg) untersucht im Projekt „Cooperative and Intrinsically Correct Control of Vehicles in Diverse Environments (CoInCiDE)“, wie autonome Fahrzeuge ihr Fahrverhalten so aufeinander abstimmen können, dass sie ihr Ziel sicher erreichen. Die Ausstattung zukünftiger Fahrzeuge mit der Technik zur drahtlosen Kommunikation und zum automatisierten Fahren macht es im Vergleich zum herkömmlichen Straßenverkehr erheblich einfacher, geplante Fahrmanöver unter den Fahrzeugen auszutauschen. Um im Szenario zu bleiben, das die Abbildung zeigt: Dies bedeutet beispielsweise, dass sich die Fahrzeuge darauf verständigen, zunächst den Fußgänger die Straße überqueren zu lassen, dass dann das weiße Fahrzeug seine Fahrt fortsetzt, und schließlich das grüne Fahrzeug vor dem LKW einparkt. Das Fachgebiet erforscht in diesem Kontext Algorithmen, mit denen die autonomen Fahrzeuge kooperativ und konfliktfrei geplante Fahrmanöver aushandeln und diese Manöver dann selbstständig realisieren. Ein besonderer Schwerpunkt liegt dabei auf der Gewährleistung der Sicherheit, wozu die Fahrzeuge modellbasiert das Verhalten der anderen Verkehrsteilnehmer berechnen und unsichere Manöver ausschließen. Das Projekt wird in Zusammenarbeit mit Arbeitsgruppen an der Technischen Universität München und dem DLR Institut für Verkehrssystemtechnik in Braunschweig durchgeführt.
*Source: Universität Kassel