
Eine einfache Geste der Begrüßung und doch außergewöhnlich: Händeschütteln zwischen einem Astronauten auf der Internationalen Raumstation ISS und Wissenschaftlern am Deutschen Zentrum für Luft- und Raumfahrt (DLR). Die Interaktion erfolgte mittels des humanoiden DLR-Roboters SpaceJustin, der sich in Oberpfaffenhofen befindet und am 17. Dezember 2015 von der ISS aus ferngesteuert wurde. Der Kosmonaut Sergei Volkov auf der ISS und DLR-Institutsdirektor Prof. Alin Albu-Schäffer auf der Erde konnten sich gegenseitig sehen, miteinander sprechen und – dank Kraftrückkoppelung – die Kraft und die Bewegung des Händeschüttelns spüren.
“Mit dem Technologie-Experiment Kontur-2 ist dem DLR ein weiterer Erfolg in der Robotik gelungen. Erstmalig wurde eine Kraftrückkopplung zwischen einem Astronauten im Erdorbit und einem Menschen auf der Erde mithilfe eines humanoiden Roboters durchgeführt”, betont Prof. Dr. Pascale Ehrenfreund, Vorstandsvorsitzende des DLR. “Die wissenschaftlichen Ergebnisse dieses Vorhabens bieten ein breites Anwendungsspektrum von der planetaren Exploration bis hin zu irdischen Anwendungen in der Telemedizin und der Telepräsenz in für den Menschen kritischen Situationen.” Telepräsenz-Systeme ermöglichen es Menschen, über große Entfernung hinweg über einen robotischen “Avatar” zu agieren und dabei das Gefühl zu haben, selbst vor Ort zu sein.
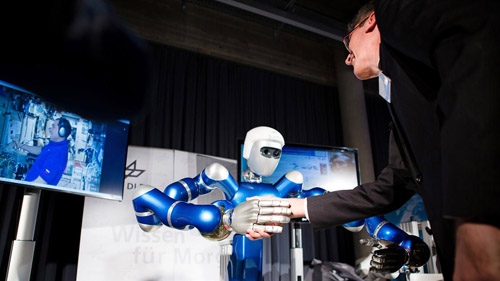
Erster Tele-Handshake mittels eines humanoiden Roboters. Kosmonaut Sergei Volkov an Bord der ISS und DLR-Institutsdirektor Prof. Dr. Alin Albu-Schäffer schütteln sich in Oberpfaffenhofen die Hand – mittels des humanoiden DLR-Roboters SpaceJustin. Am 17. Dezember 2015 wurde erstmals ein humanoider Roboter aus dem Weltall ferngesteuert.Image credit: DLR
Unerreichte Komplexität
Noch nie zuvor wurde ein humanoider Roboter vom Weltall aus gesteuert. Die Steuerung und Kraftrückkopplung von SpaceJustins Arm erfolgte mit dem Kontur-2 Joystick, der seit Juli 2015 an Bord der ISS ist und vom DLR-Institut für Robotik und Mechatronik entwickelt wurde. Die Besonderheit der Technologie und des Experiments liegen in ihrer bisher unerreichten Komplexität: Mit dem raumfahrttauglichen Joystick auf der ISS ist man in der Lage, dem Astronauten feinfühlige Kraftrückkoppelung in Echtzeit zu übermitteln. Ein zusätzliches Bedienelement des Joysticks ermöglicht das Schließen der Roboterhand, so dass der Astronaut sogar einen Gegenstand greifen kann.

Kontur-2 Joystick. Der Kontur-2 Joystick ist seit Juli 2015 an Bord der ISS und wurde vom DLR-Institut für Robotik und Mechatronik entwickelt. Er erlaubt telepräsente Steuerung in zwei Freiheitsgraden mit Kraftrückkoppelung. Für die ISS-Qualifizierung muss der Joystick besondere Anforderungen erfüllen, die den zuverlässigen und sicheren auf der ISS gewährleistet. Image credit: DLR
ISS – St. Petersburg – Oberpfaffenhofen
Eine der größten Herausforderungen für Telepräsenz-Anwendungen in der Raumfahrt ist die Zeitverzögerung bei der Datenübertragung. Bei einer Distanz von rund 400 Kilometern beträgt die Verzögerung rund 30 Millisekunden. Hierbei stellt ein spezielles Regelungskonzept sicher, dass durch die Verzögerung kein instabiles Verhalten entstehen und bei dem sich das System unkontrolliert aufschwingen kann. Die Kraftrückkopplung funktionierte bei dem Tele-Handshake im DLR dabei so ausgezeichnet, dass den Wissenschaftlern ein weiteres, anspruchsvolles Experiment gelang:
Während ISS-Besatzungsmitglied Volkov den rechten Arm von SpaceJustin fernsteuerte, übernahm das russische Institut RTC in St. Petersburg (Russian State Scientific Center for Robotics and Technical Cybernetics) die Steuerung des linken Roboterarms. Das Institut RTC verfügt über einen identischen Kontur-2 Joystick vom DLR und wurde aus seinem Labor in St. Petersburg zugeschaltet. Gemeinsam griffen Volkov und RTC mittels SpaceJustin nach einem Ball und übergaben den Ball an das DLR-Team in Oberpfaffenhofen, das den Ablauf koordinierte. Alle drei Beteiligten konnten dabei die Kontaktkräfte der Anderen spüren – das Drücken gegen den Ball beim Greifen und das Loslassen beim Aushändigen des Balls.

Kontur-2: Deutsch-Russische Kooperation. Kontur-2 ist eine erfolgreiche Kooperation des Deutschen Zentrums für Luft- und Raumfahrt (DLR) mit der russischen Raumfahrtbehörde Roskosmos, dem Institut RTC in St. Petersburg (Russian State Scientific Center for Robotics and Technical Cybernetics), RSC “Energia” Moskau und dem Juri-Gagarin-Kosmonautentrainingszentrum. Im Bild: Prof. Dr. Hansjörg Dittus (links), DLR-Vorstand für Raumfahrtforschung- und Technologie – Prof. Dr. Alin Albu-Schäffer (Mitte), Direktor des DLR-Instituts für Robotik und Mechatronik – Oleg Volkov (rechts), RSC “Energia”-Deputy Head. Image credit: DLR
Robonaut der Zukunft
Für die Raumfahrt sind Telepräsenz-Technologien in Zukunft unverzichtbar: Astronauten könnten von einer Raumstation aus einen Roboter steuern, der zum Beispiel den Mars oder den Mond erkundet und dort feinmotorische Aufgaben erfüllen soll. Auch Wartungs- und Reparaturarbeiten an Satelliten können vom Boden aus telepräsent durchgeführt werden.
Der Tele-Handshake und die kooperative Ballübergabe markieren den Höhepunkt der Experimentreihe “Kontur-2”, in der die Telepräsenz-Technologie auf der ISS optimiert und getestet wurde. Nach der erfolgreichen Demonstration dieser Technologie ist das DLR-Institut für Robotik und Mechatronik bereit für die nächsten Schritte: Die telepräsente Steuerung kann künftig auch auf Bediensysteme mit mehr als zwei Freiheitsgraden übertragen werden. Das erlaubt eine Steuerung in jede Raumrichtung und bereitet der Weg für eine neue Etappe in der telepräsenten Raumfahrt-Robotik. Komplexere Aufgaben sind künftig möglich: Der Astronaut wird nicht nur in der Lage sein, Arm und Hand von SpaceJustin zu steuern, sondern den gesamten Körper eines humanoiden Roboters.
*Source: Deutsches Zentrum für Luft- und Raumfahrt (DLR)